焊接机器人概念:
焊接机器人是从事焊接(包括切割与喷涂)的工业机器人,它主要包括机器人和焊接设备两部分。
其中,机器人由机器人本体和控制柜(硬件及软件)组成;而焊接装备,以弧焊及点焊为例,则由焊接电源(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人,还应配有传感系统,如激光或摄像传感器及其控制装置等。
点焊机器人的特点:
由于采用了一体化焊钳,焊接变压器装在焊钳后面,所以点焊机器人的变压器必须尽量小型化。
对于容量较小的变压器可以用50Hz工频交流,而对于容量较大的变压器,工业上已经开始采用逆变技术把50Hz工频交流变为600~700Hz交流,使变压器的体积减少、减轻。
变压后可以直接用600~700Hz交流电焊接,也可以再进行二次整流,用直流电焊接,焊接参数由定时器调节。
目前,新型定时器已经微机化,因此机器人控制柜可以直接控制定时器,无需另配接口。点焊机器人的焊钳,用电伺服点焊钳,焊钳的张开和闭合由伺服电机驱动,码盘反馈,使焊钳的张开度可以根据实际需要任意选定并预置,而且电极间的压紧力也可以无级调节。
电伺服点焊钳具有如下优点:
每个焊点的焊接周期可大幅度降低,因为焊钳的张开程度是由机器人精确控制的,机器人在点与点之间的移动过程,焊钳就可以开始闭合;而焊完一点后,焊钳一边张开,机器人就可以一边位移,不必等机器人到位后,焊钳才闭合或焊钳完全张开后机器人再移动。
焊钳张开度可以根据工件的情况任意调整,只要不发生碰撞或干涉,可尽可能减少张开度,以节省焊钳开度,节省焊钳开合所占的时间。
焊钳闭合加压时,不仅压力大小可以调节,而且在闭合时两电极是轻轻闭合,可减少撞击变形和噪声。
弧焊机器人的特点:
弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。
近年来,国外机器人生产厂都有自己特定的配套焊接设备,在这些焊接设备内已经插入相应的接口板,所以弧焊机器人系统中并没有附加接口箱。
应该指出的是,在弧焊机器人工作周期中,电弧时间所占的比例较大,因此在选择焊接电源时,一般应按持续率100%来确定电源的容量。
送丝机构可以装在机器人的上臂上,也可以放在机器人之外,前者焊枪到送丝机之间的软管较短,有利于保持送丝的稳定性,而后者软管校长,当机器人把焊枪送到某些位置,使软管处于多弯曲状态,会严重影响送丝的质量,所以送丝机的安装方式一定要考虑保证送丝稳定性的问题。

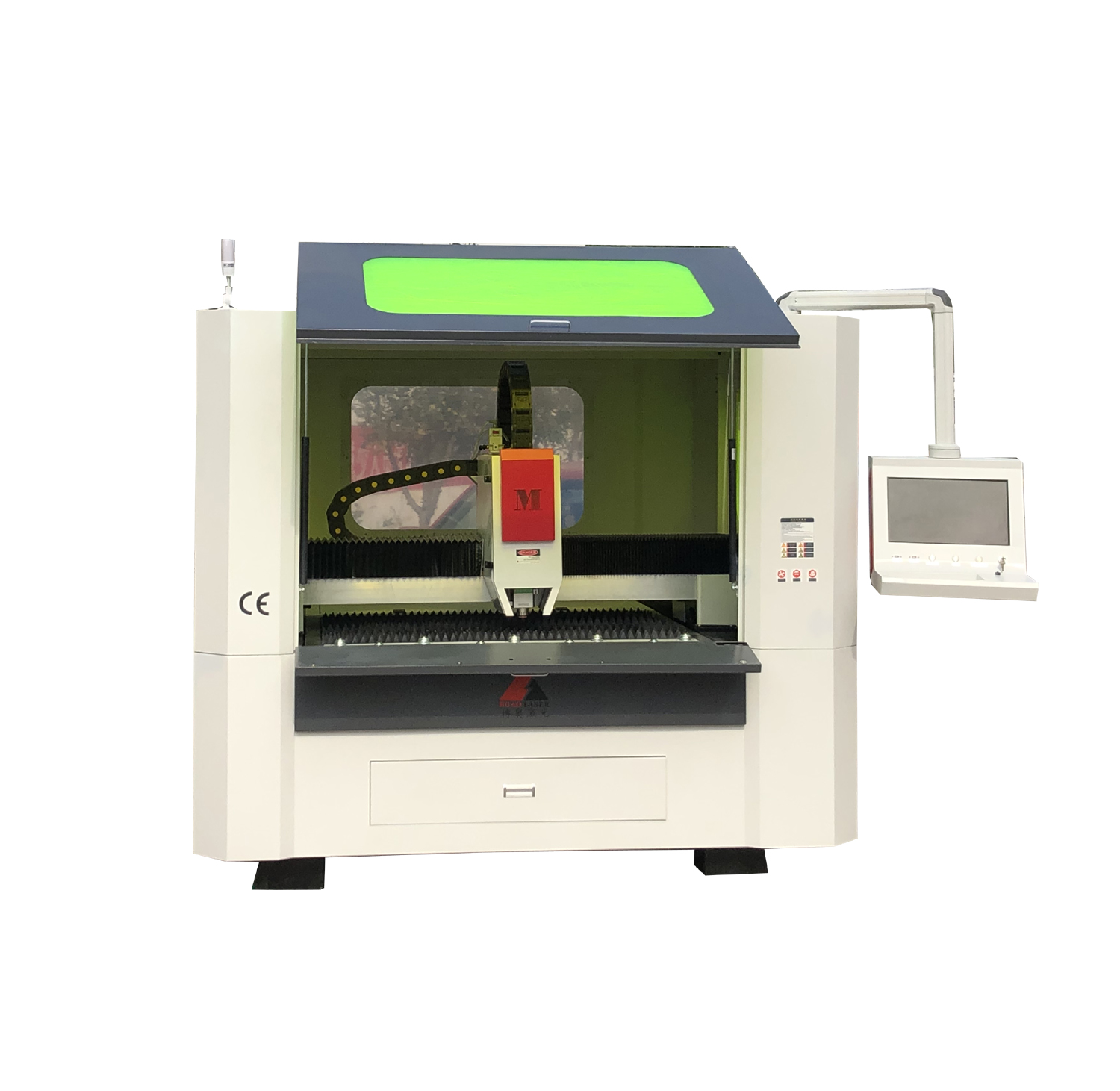
金属激光焊接设备 推荐:优惠多 聚划算 报价4007001618
【金属激光焊接设备】适用于各种复杂的焊接,不同设备的点焊和1毫米厚的焊缝焊接;多路光纤模式,同时焊接多工位;
【模具激光焊接设备】适用模具工业化,用于精密模具的维修,如数码产品、手机、玩具、汽车、摩托车、模具等模具制造和成型行业;
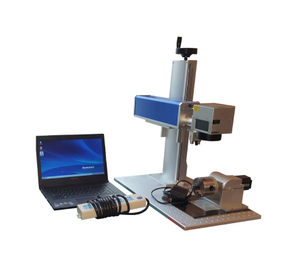
【金银首饰激光焊接】主要用于珠宝首饰、电子元件等、通信、工艺品等行业;
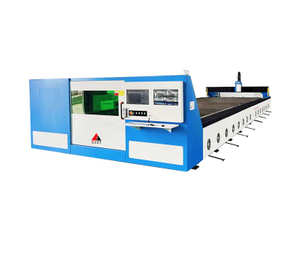
【大型激光焊接】应用在汽车车身覆盖件类零件的组焊,如汽车车门、侧围、天窗、地板、前仓、后仓、行李箱盖。